„Jestem taki szczęśliwy i niesamowity!”
── Jestem taki szczęśliwy! niesamowity! Przedstawiamy pomysły i technologie ──
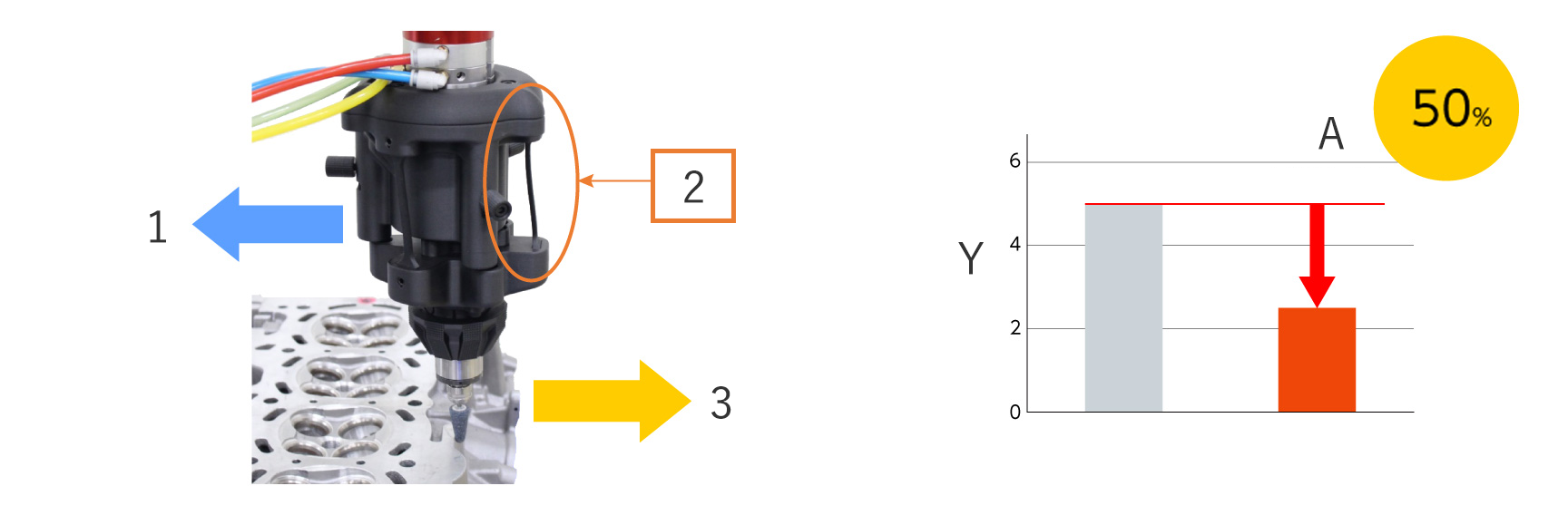
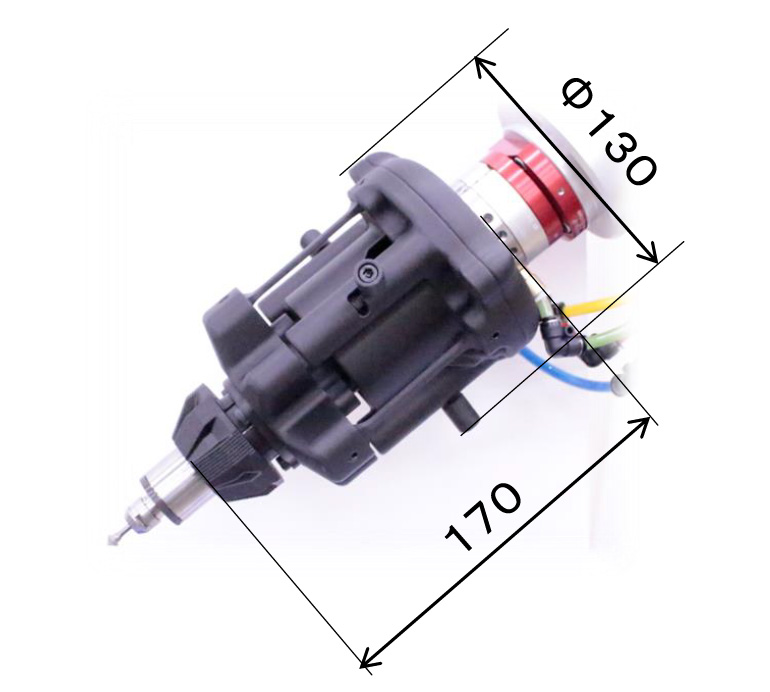
Pływająca ręka do gratowania to współpracująca ręka robota do chwytania narzędzi do gratowania.
Części składowe są wykonane z produktów wytwarzanych addytywnie z CFRP, które mają wysoki stosunek wytrzymałości do masy i mogą wytwarzać dowolne kształty, których nie można wytworzyć konwencjonalnymi metodami przetwarzania, co skutkuje lekkim korpusem o dużej wytrzymałości i dużą pływalnością, która nie nie wymaga źródła napędu.Posiada mechanizm.
Możliwe jest śledzenie nawet skomplikowanych detali i stabilne usuwanie zadziorów, co znacznie skraca czas potrzebny na nauczanie.
O to chodzi!
Lżejszy dzięki zastosowaniu CFRP i wydrążeniu wnętrza
(Y: Waga(kg) ; A: Poprzez produkcję przyrostową CFRP; SZARY: Metaliczny, CZERWONY: Ten produkt;)
1: Wymiana materiału,
2: Metal,
3: CFRP (Ciężar właściwy: 1,2 g/cm3),
4: Pusta struktura wewnętrzna,
O to chodzi!
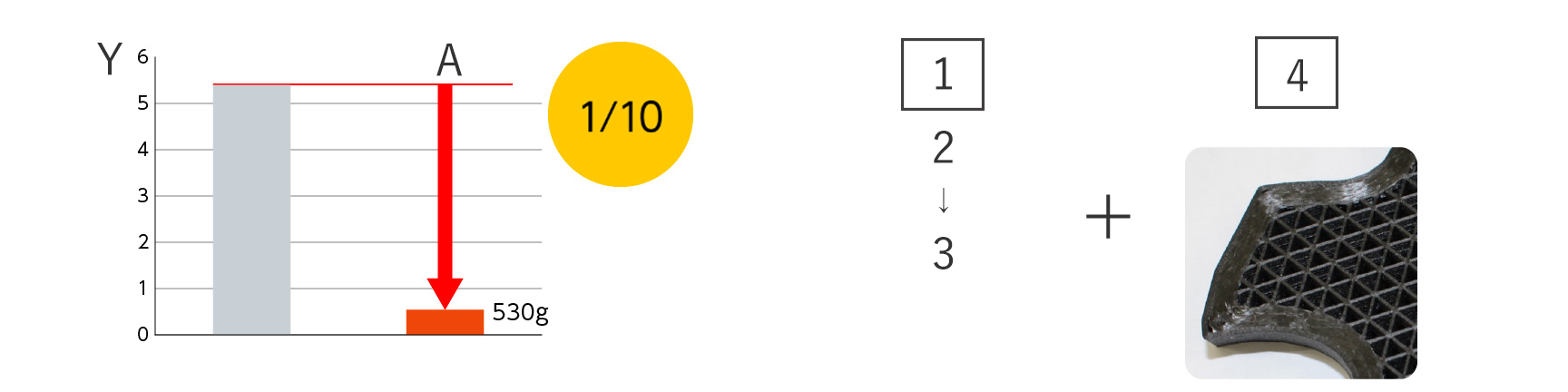
Mechanizm pływakowy wykorzystujący elastyczność CFRP może podążać za złożonymi przedmiotami.
(Y: Czas nauczania (H) ; A: Dzięki mechanizmowi pływakowemu; SZARY: Brak mechanizmu pływającego, CZERWONY: Mechanizm pływający Tak;)
1: Dociśnij do obrabianego przedmiotu,
2: Mechanizm pływający,
3: Kwota pływająca: Maks. 10 mm,
Koncepcja rozwoju/koncepcja produktu
„Aktualny stan i problemy”
- Wraz z przejściem na inteligentne fabryki i promowaniem neutralności pod względem emisji dwutlenku węgla, zakłady produkcyjne muszą oszczędzać siłę roboczą, zasoby i energię, a automatyzacja poprzez wprowadzenie robotów jest jednym z rozwiązań.
Nie da się jednak osiągnąć „wprowadzenia robota = natychmiastowa automatyzacja”, aby robot zamiast pracownika mógł pracować, należy wybrać rękę i nauczyć robota obsługi. - Ręce muszą być lekkie, ponieważ podlegają udźwigowi robota, a przy ich wprowadzaniu konieczne jest zabezpieczenie zasobów ludzkich umiejętnościami dydaktycznymi i skrócenie czasu potrzebnego na nauczanie.
- W miarę wzrostu zapotrzebowania na automatyzację procesu gratowania pojawia się zapotrzebowanie na możliwość podążania za przedmiotami o skomplikowanych kształtach, nawet przy minimalnym nauczaniu.
„Punkty rozwoju”
- „Pływająca ręka gratująca” wykorzystuje w swoich elementach technologię przyrostową CFRP, umożliwiając stworzenie lekkiego korpusu o dużej wytrzymałości i swobodnych kształtów, których nie można uzyskać przy użyciu konwencjonalnych metod przetwarzania.
- Wybierając ramię robota, nie musisz martwić się o udźwig, może ono podążać nawet za skomplikowanymi przedmiotami i stabilnie usuwać zadziory, znacznie skracając czas potrzebny na nauczanie.
- Mechanizm wysokiego pływaka, który wykorzystuje właściwości CFRP, nie wymaga źródła napędu i można go dostosować do optymalnej siły pływaka w zależności od przedmiotu obrabianego.