„Materiały lekkie” + „technologia modelowania” detalipasowaćRozpoznaje kształt dłoni
Ręka transportowa zaprojektowana z myślą o lekkości i elastyczności
Z lekkim korpusem Mała ładownośćKompatybilny z ramionami robota
── Jestem taki szczęśliwy! niesamowity! Przedstawiamy pomysły i technologie ──
Ręka transportowa to ręka transportowa robotów współpracujących, która transportuje szeroką gamę przedmiotów obrabianych. Do części składowych stosuje się produkty wytwarzania przyrostowego CFRP. Charakteryzuje się wysokim stosunkiem wytrzymałości do masy, dzięki czemu możliwe jest wytwarzanie dowolnych kształtów, których nie da się uzyskać konwencjonalnymi metodami obróbki. Oprócz lekkiego i wytrzymałego korpusu, kształt dłoni można dowolnie dostosować do obrabianego przedmiotu. Osiągnij automatyzację transportu szerokiej gamy detali.
O to chodzi!
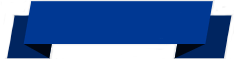
Lżejszy dzięki zastosowaniu CFRP i wydrążeniu wnętrza
Doskonały!
Weight 1/10
(Y: Waga(kg) ; A: Poprzez produkcję przyrostową CFRP; SZARY: Metaliczny, CZERWONY: Ten produkt;)
1: Wymiana materiału,
2: Metal,
3: CFRP (Ciężar właściwy: 1,2 g/cm3),
4: Pusta struktura wewnętrzna,
O to chodzi!
Lżejszy dzięki zastosowaniu CFRP i wydrążeniu wnętrza
Doskonały!
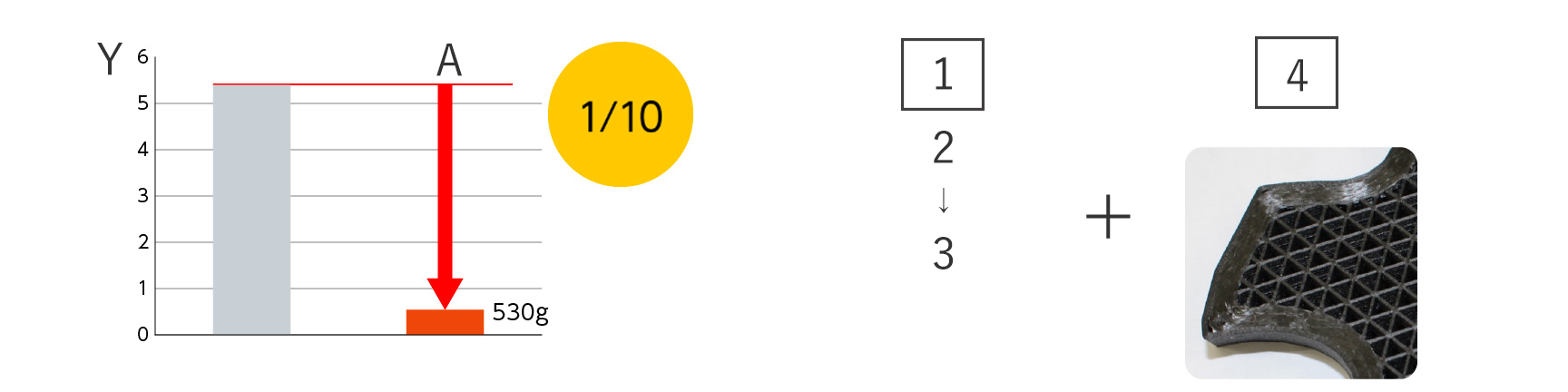
A: Kształt pracy - B: Cylinder (2 stopnie) - C: Drut płaski.
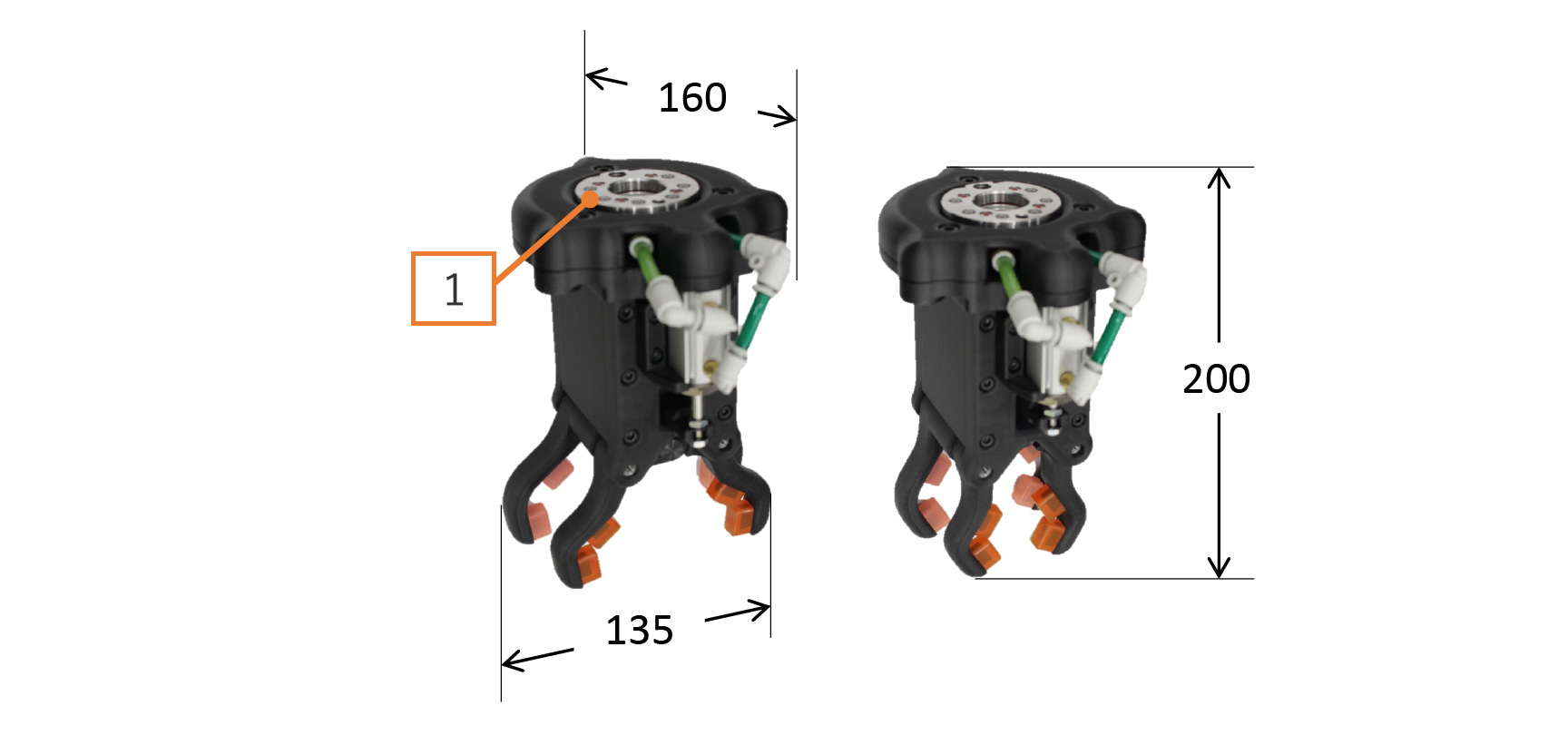
1: Wymiary części chwytającej (mm),<br> 2: Kształt paznokcia,
Koncepcja rozwoju/koncepcja produktu
„Aktualny stan i problemy”
Wraz z przejściem na inteligentne fabryki i promowaniem neutralności pod względem emisji dwutlenku węgla, zakłady produkcyjne muszą oszczędzać siłę roboczą, zasoby i energię, a automatyzacja poprzez wprowadzenie robotów jest jednym z rozwiązań.
Rośnie także zapotrzebowanie na automatyzację transportu detali, przy czym ze względu na ograniczenia w zakresie udźwigu robotów podkreśla się wagę ręki, a jednocześnie dłoń posiada funkcjonalność umożliwiającą chwytanie szerokiej gamy detali i ich transport do pozycji i pozycji zgodnie z celem. Zostało to wymagane.
„Punkty rozwoju”
„Ręka transportowa” wykorzystuje w swoich elementach obróbkę przyrostową CFRP, umożliwiając stworzenie lekkiego korpusu o dużej wytrzymałości oraz swobodnych kształtów, których nie da się uzyskać przy użyciu konwencjonalnych metod przetwarzania. Kształt dłoni można także dowolnie dostosować do obrabianego przedmiotu.
Ponieważ jest wyjątkowo lekki w porównaniu z metalową ręką, możliwe jest transportowanie cięższych przedmiotów przy użyciu tego samego ramienia robota.
Specyfikacja produktu
*Ze względu na specyfikację wymienionych produktów jest to wartość referencyjna. Istnieje możliwość wykonania specjalnych projektów i wykonań w zależności od przeznaczenia i zastosowania.
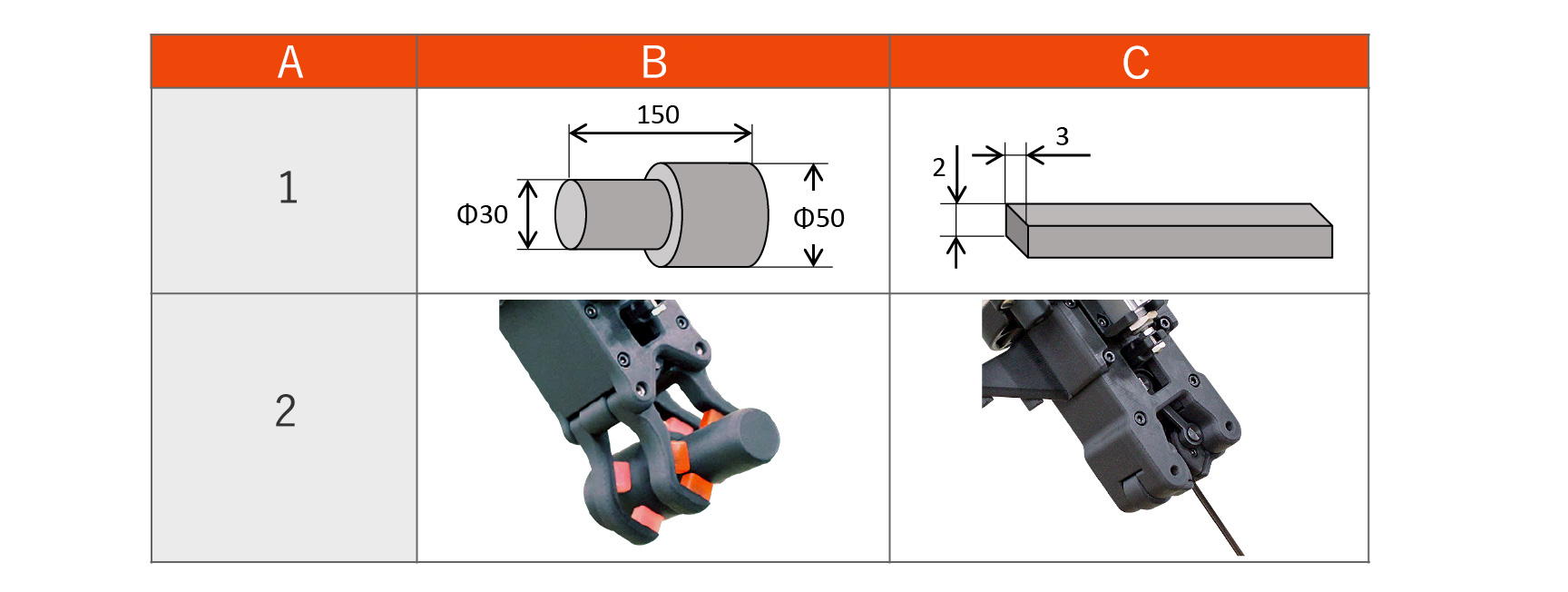
1: Lekki 530g Stosunek metalu 1/10,<br> 2: Kształt pazura dopasowany do obrabianego przedmiotu,<br> 3: Praca docelowa Dwustopniowy kształt cylindryczny 50 dolarów (30) × 150,
1: Mechanizm ATC Źródło zasilania: powietrze
Rozmiar (mm)
Opisane na schemacie
Waga (g)
530 *1
chwytając za źródło zasilania
Powietrze (0,4 MPa)
Siła chwytania (N)
16 *2
Docelowy kształt przedmiotu obrabianego (mm)
Opisane na schemacie
*1Wartość z wyłączeniem części takich jak zmieniacz narzędzi
*2Teoretyczna wartość obliczeniowa przy ciśnieniu 0,4 MPa (nie wartość doświadczalna)