Workpiece transport, changeover of parts

Posture inversion Assembly of changeover parts


Type CL
Claw opens and closes with coolant pressure

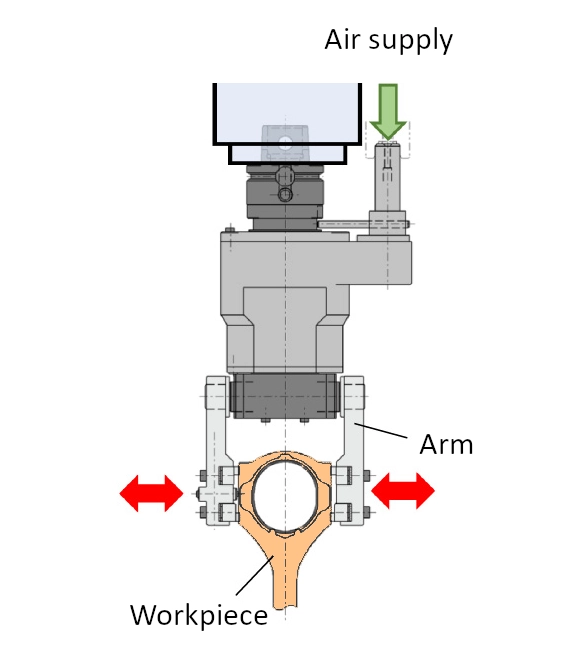
Type AR
Arm opens and closes with air pressure

Type ST
Claw opens and closes by rotating the main axis 90°